





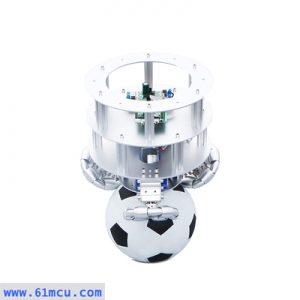
单球驱动自平衡机器人根据陀螺仪的位姿数据,通过三全向轮驱动底部球体调整自己在球上的位置,保持动态平衡的同时实现全向移动。












|

| 
| 
| 
| ||||||||||||||||||||||||
| 
| 
| 
| ||||||||||||||||||||||||

| 
| ||||||||||||||||||||||||||
| 买家 | 购买价 | 购买数量 | 购买时间 |
|---|---|---|---|
| 宝*** | 0.000 | 1 | 2011-08-31 |
| 地址:北京市顺义区临空经济核心区裕华路28号2号楼2层 客户服务电话:010-62669059 邮箱:fae@61mcu.com | |
| Copyright © 2004-2021 北京纳克斯机器人技术有限公司. All rights reserved. 京ICP备2021012102号 | |
| (浏览本网主页,建议将电脑显示屏的分辨率调为1024*768) | |
| ( 备用域名:www.nuxrobot.com,www.nuxrobot.cn,www.nuxtech.cn) | |
|
|
|

