




|
| 类型 | 货号 | 价格 |
|---|---|---|
| 基础款 | 0134-1 | ¥880.00 |
| 高级款 | 0134-2 | ¥1580.00 |
倒立摆,Inverted Pendulum ,是典型的多变量、高阶次 ,非线性、强耦合、自然不稳定系统。倒立摆系统的稳定控制是控制理论中的典型问题 ,在倒立摆的控制过程中能有效反映控制理论中的许多关键问题 ,如非线性问题、鲁棒性问题、随动问题、镇定、跟踪问题等。因此倒立摆系统作为控制理论教学与科研中典型的物理模型 ,常被用来检验新的控制理论和算法的正确性及其在实际应用中的有效性。从 20 世纪 60 年代开始 ,各国的专家学者对倒立摆系统进行了不懈的研究和探索。
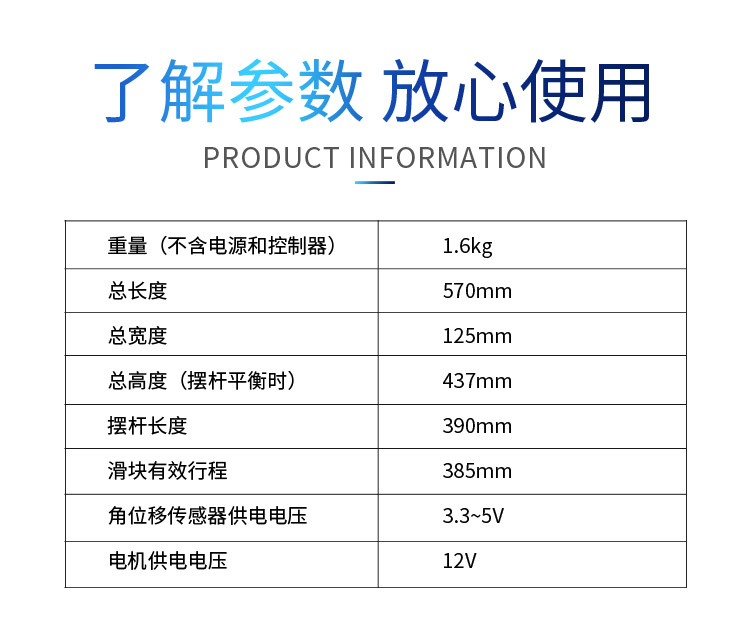
倒立摆系统的输入为小车的位移(即位置)和摆杆的倾斜角度期望值,计算机在每一个采样周期中采集来自传感器的小车与摆杆的实际位置信号,与期望值进行比较后,通过控制算法得到控制量,再经数模转换驱动直流电机实现倒立摆的实时控制。直流电机通过皮带带动小车在固定的轨道上运动,摆杆的一端安装在小车上,能以此点为轴心使摆杆能在垂直的平面上自由地摆动。作用力F平行于铁轨的方向作用于小车,使杆绕小车上的轴在竖直平面内旋转,小车沿着水平铁轨运动。当没有作用力时,摆杆处于垂直的稳定的平衡位置(竖直向下)。为了使杆子摆动或者达到竖直向上的稳定,需要给小车一个控制力,使其在轨道上被往前或朝后拉动。
基础版:












| 
| 
| 
| ||||||||||||||||||||||||
| 
| 
| 
| ||||||||||||||||||||||||

| 
| ||||||||||||||||||||||||||
| 地址:北京市顺义区临空经济核心区裕华路28号2号楼2层 客户服务电话:010-62669059 邮箱:fae@61mcu.com | |
| Copyright © 2004-2021 北京纳克斯机器人技术有限公司. All rights reserved. 京ICP备2021012102号 | |
| (浏览本网主页,建议将电脑显示屏的分辨率调为1024*768) | |
| ( 备用域名:www.nuxrobot.com,www.nuxrobot.cn,www.nuxtech.cn) | |
|
|
|









