












1.描述Description:
这是一款利用2只大扭矩舵机设计的机械手爪;

机械手是指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全。
所以学习机械手的控制和使用,对机器人制作和各类机器人竞赛有着重要的作用和意义。
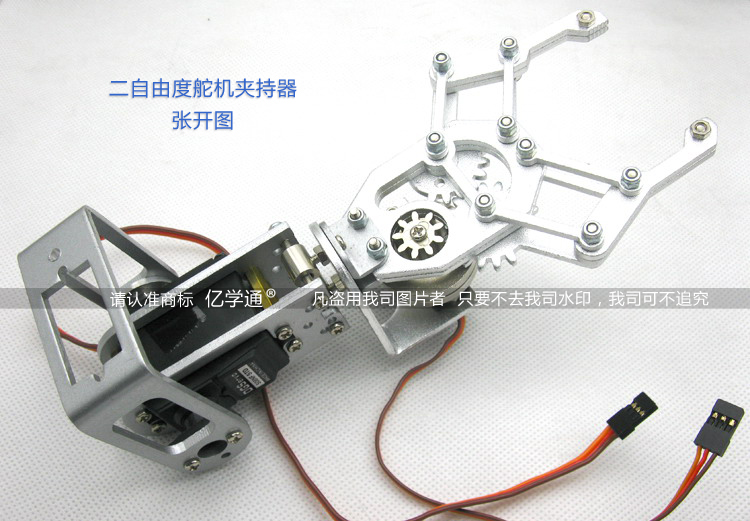
为了满足以上需求,我们开发了这款基于舵机的“二自由度舵机手爪”。通过标准的机电控制接口,结合巧妙的机械结构,可以帮助机器人完成物体的抓取、升降搬运。整个机械手采用了厚度3mm铝合金材质,通过线切割加工工艺,使得整个产品,牢固、轻便、精确、漂亮,质量远非普通的市场上钣金仿冒品所能达到的。手爪使用的舵机也是特别定制的,增加了扭力、延长了寿命。
2013年我们又在原来机械手爪基础上,进一步改进夹持器结构,新款的手爪,性能更好。

新版“二自由度舵机手爪(夹持器)”改进说明:
由于夹持器的张开角度和舵机的转动角度成等比例关系。当手爪加持不同大小的物体时,理想情况是,舵机可以根据不同物体的大小而改变自动改变角度以适应物体大小。
但由于舵机手爪没有压力检测传感器反馈,当我们控制手爪抓取物体时,如果舵机带动手爪转动角度小于物体宽度时,舵机就会发生堵转,此时继续加大扭矩,舵机就会因过载而烧掉。
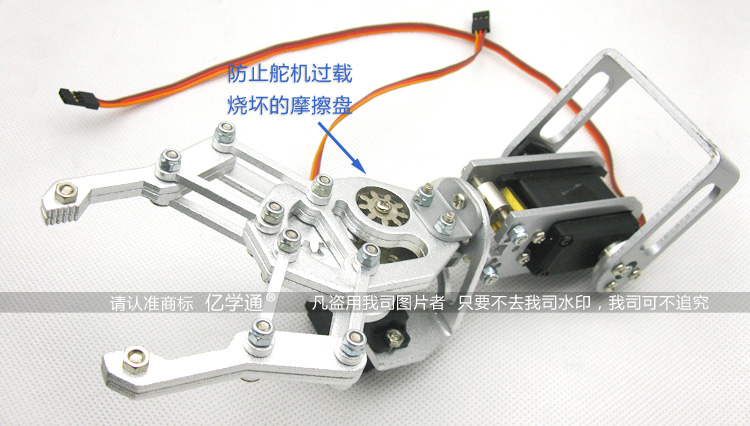
为了解决这个问题,新款的二自由度舵机手爪(夹持器),参考汽车摩擦式离合器原理和结构,为机械手爪增加了一个“摩擦盘”:在舵机和手爪中间,通过两个圆盘摩擦连接,传递扭力。
只要我们设置合适的摩擦系数,当舵机的遇到的阻力大于两个圆盘摩擦力的时候,两个圆盘发生相对运动,避免了舵机电流堵塞发生。当舵机扭力小于摩擦力的时候,舵机带动夹持器完成物体抓取动作。其原理图和效果请看下图:
2、规格Specifications:
机械参数:
- 材质:铝合金
- 加工工艺:线切割电镀
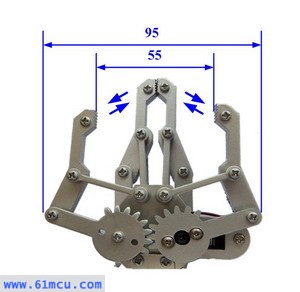
- 爪子最大张角:55mm
- 2自由度爪子整体长度:180mm
- 2自由度爪子整体宽度:95mm
- 搬运物体:>1Kg
DG-S8110E 舵机参数:
- 尺 寸:42*20.5*38mm
- 重 量:54g
- 速 度:0.22sec/60°
- 输出力矩:足13kg·cm(最大力矩可达到15KG)
电气参数:
- 工作电压:4.8-6.0V
- 工作电流:0.8-1.5A
3、图片Pictures:







使用二自由度舵机手爪(夹持器)完成的作品设计图
Video 1:4WD+2DOF 移动视频II
4、注Notes:
- 查看手爪视频,请到公司网站:http://www.61mcu.com/list.asp?ProdId=0158
- 公司网站、商城的产品和文档版权所有,未经许可不得全部或部分引用公司产品描述文件、图片、表格等资料。


