




|

前言:
机械手是指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全。
所以学习机械手的控制和使用,对机器人制作和各类机器人竞赛有着重要的作用和意义。
机械手臂简介:
就本产品而言,伺服机器手臂,顾名思义,是由六个伺服电机驱动的机器手臂。既然是手臂,那么就有几个关节,大家可以联想到,我们人类的手臂,除了肩、肘、腕这三个关节外,再加上手指的关节,就有很多个关节了。那么我们这个机器手臂也是一样,用6个伺服电机实现了一个手的简单结构,除了没有人那么多的关节外,还缺少一些神经组织和神经系统,然而,具有“灵巧手”(可完成复杂装配、搬运或仿人手抓取鸡蛋)的“仿人形”机器人乃机器人研究的前沿。
而我们的6个伺服机器,以巧妙的机械结构,结合它的控制系统,展示了6自由度机器手动作的控制原理。它采用3个13kg扭力的金属齿轮、一个3.2kg、两个2.3kg的伺服和一些精密的铝合金加工组件组合而成。目前,我公司的机器手臂以390mm长度的为主,使用32路控制器来控制机器手臂的运行动作,本控制器采用atmega168 MCU,和电脑RS232串口通讯,可同时控制32颗伺服电机,双电源供电(6~12V单片机供电,4.8~6V伺服电机供电[伺服电机供电分别设有1-16路和17-32路供电端口]),同时还设有wi-fi无线控制模块,预留ISP下载口,用STK500 ISP下载线便可以下载MCU控制程序。
这套机器手臂,无论是robot fans做个人开发还是学生参赛,都是机器人爱好的合适的教育平台。
夹持器改进说明:
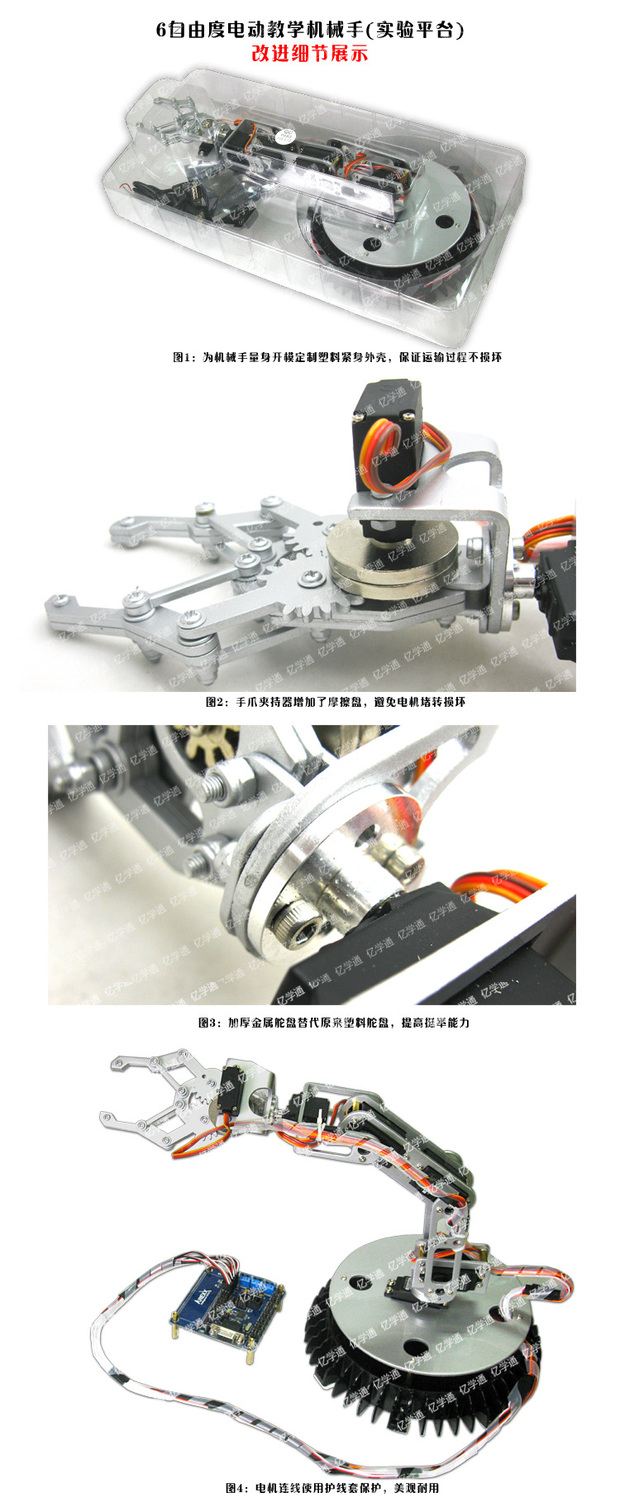
由于夹持器的张开角度和舵机的转动角度成等比例关系。当手爪加持不同大小的物体时,理想情况是,舵机可以根据不同物体的大小而改变自动改变角度以适应物体大小。但由于舵机手爪没有压力检测传感器反馈,当我们控制手爪抓取物体时,如果舵机带动手爪转动角度小于物体宽度时,舵机就会发生堵转,此时继续加大扭矩,舵机就会因过载而烧掉。
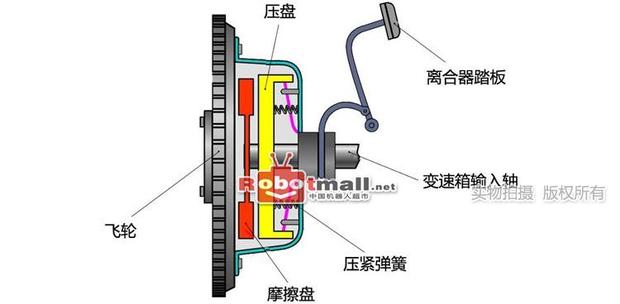
为了解决这个问题,新款的二自由度舵机手爪(夹持器),参考汽车摩擦式离合器原理和结构,为机械手爪增加了一个“摩擦盘”:在舵机和手爪中间,通过两个圆盘摩擦连接,传递扭力。
只要我们设置合适的摩擦系数,当舵机的遇到的阻力大于两个圆盘摩擦力的时候,两个圆盘发生相对运动,避免了舵机电流堵塞发生。当舵机扭力小于摩擦力的时候,舵机带动夹持器完成物体抓取动作。其原理图和效果请看下图:
机械手参数:
搬运负载:≥300g
机器手臂:总长度≥400mm
材料:铝合金
舵机性能:
(1)4个伺服电机:
输出力矩:≥10kg•cm
(2)2个伺服电机:
输出力矩:≥2kg•cm
控制器参数:
(1)与电脑RS232串口通讯,可同时控制不少于30个伺服电机;
(2)双电源供电;
(3)预留ISP下载口,wi-fi无线控制接口;
电气参数:
电机工作电压:4.8-6.0V
控制器工作电压:6.0-12V
工作电流:1.2-2.5A
搬运负载:300-500g
舵机性能简介:
1、手臂伺服舵机:
尺 寸:40.4*19.8*36mm
重 量:48g
速 度:0.22sec/60°
输出力矩:13kg·cm
2、 手爪夹持器舵机:
尺 寸:28x14x29.8mm
重 量:18g
速 度:0.13sec/60°
输出力矩:2.3kg·cm
机械手臂图片和视频:

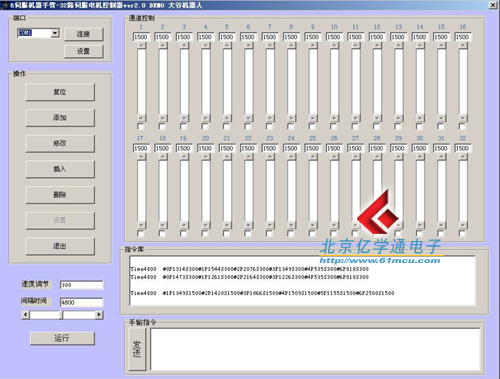
32路伺服电机控制系统界面:
控制器介绍:


1)如图所示:从上往下看,电路板正面有三个电源输入口,中间的为单片机的电源输入。使用了7805将电压稳定在5V。因此输入的电压在6V到12V之间即可。两侧分别供应16路伺服电电机的。输入电压在4。8V~6V之间。
2)伺服电机插针为32排,每排3针。如图上蓝色字体所标志,最外侧的针是地,中间是电源,最内侧是信号针(接伺服电机上的白色或橙色线)。
3)中间的跳线是设置波特率的,两个跳线都插上,代表了的值是11,波特率是115.2k。若要设置其他波特绿请参考图2所示。(上位机软件默认的设置是115。2K。)
产品配置:
机械手臂 1台
机械手臂控制器 1台(AVR单片机为主控制器,提供控制代码)
串口线 1条
电池盒 1个
光盘 1张
功能扩展:

加装到6WD车底盘上的“6自由度机械手”
资料下载:
|
| 大小:1.19MB | 上传日期:2011.01.17 |
|
| 大小:152KB | 上传日期:2011.04.25 |
产品配置:
| 配置 |

 配件: 配件:


 | 售价: |
| 功能描述 | 1、6伺服机器手臂(3个12KG的金属舵机,一个7.2KG的,两个2.3KG的伺服电机); | ¥1980 |

| |||||||||
| 买家 | 购买价 | 购买数量 | 购买时间 |
|---|---|---|---|
| hua*** | 1980.000 | 1 | 2017-09-30 |
| 地址:北京市顺义区临空经济核心区裕华路28号2号楼2层 客户服务电话:010-62669059 邮箱:fae@61mcu.com | |
| Copyright © 2004-2021 北京纳克斯机器人技术有限公司. All rights reserved. 京ICP备2021012102号 | |
| (浏览本网主页,建议将电脑显示屏的分辨率调为1024*768) | |
| ( 备用域名:www.nuxrobot.com,www.nuxrobot.cn,www.nuxtech.cn) | |
|
|
|








