

|
气动三自由度机械手类型:

气吸盘式气动机械手

机械手爪式气动机械手
机械手臂功能演示视频:
“气压传动与控制”是一门工业、尤其是轻工业上应用非常普遍的技术。它以空气作为传动介质,将气体的压力能(势能)转化为机械能的一种传动方式,比液压传动成本低、清洁环保,比机械传动控制灵活、调节方便,并可与电气控制结合,形成便捷高效的电气混合控制。
三自由度气动机械手,作为一款高性价比、可重复拆装的气压传动控制类实验设备,创新性的采用了模块化的设计理念,从机械结构到电气控制部分,均为独立单元,方便了认知教学、机械拆装、编程实训、功能扩展等环节。在知识点设置上,涵盖了气缸/电磁阀控制、单片机或PLC编程、步进电机驱动、机械绘图与装配等多门类课程。不但适用于课堂教学实验,更适合用于课程设计、毕业设计等创新实践环节。以帮助同学们加深印象,提高实际动手能力,为融会贯通书本理论知识,分析解决工程实际问题奠定一个良好的基础。
在知识点设置上,涵盖了气缸/电磁阀控制、单片机或PLC编程、步进电机驱动、机电一体化等多门类课程。不但适用于课堂教学实验,更适合用于课程设计、毕业设计等创新实践环节。
本产品标准配置,使用的是51单片机控制器。对于需要使用PLC控制的用户,可定制。
气动三自由度机械手简介:
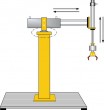
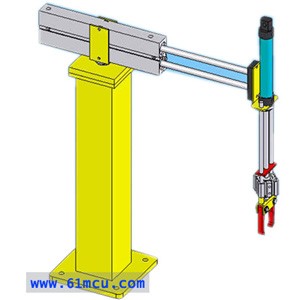
机械手包括机械手主体及控制器两部分:机械手臂和控制器。
机械手部分为RPP型:
其水平旋转位移由1.8°步距角的步进电机实现,其旋转角度为±180°;
其水平直线运动由TN型气缸实现,其伸缩长度为200mm;
其垂直直线运动由MSAL型铝合金迷你气缸实现,其伸缩长度为100mm;
其手爪为气动手爪,由方形SDAJ系列气缸实现,可实现对直径在φ20mm—φ40mm的物体进行夹持;
机械手参数:
机械手可运动物体的重量不小于1kg;
该机械手整体高度为1200mm,宽度为200mm,长度最大为500mm。
控制箱部分:
控制器为扁平状塑料壳体,配有可水平安装或垂直安装的孔,孔径为Φ5.5;
控制箱内配有单片机控制板,芯片为STC89S52,片内烧有程序,可实现机械手的自动循环演示;
同时机械手控制箱配备有手动控制面板,使其水平旋转自由控制,其余点动控制,按相关按钮后该动作自动完成;
控制箱留有各自由度输入控制信号的接口,以方便PLC、生产线等实验上的应用。
整体色调:加工件喷涂橙色,方式为喷漆或喷塑;外购件保持原色,控制箱为灰色。
用途:
本机械手可用于下列课程的实验:
① 机械专业物流系统综合性、创新性、设计性实验;
② PLC与电器控制实验;
③ 计算机控制技术实验;
④ 单片机、ARM、DSP等的相关实验;
⑤ 液压气动技术;
⑥ 工业机器人技术。
附:实验指导书:
实验1 气动机械手认知及气路连接实验
实验2 气动机械手手持盒液晶显示编程实验
实验3 气动机械手手持盒与PLC的通讯实验
实验4 气动机械手手持盒与计算机通讯实验
实验5 气动机械手单片机控制实验
实验6 气动机械手PLC控制实验
实验7 气动机械手计算机控制实验
实验8 基于PLC的气动搬运机械手协同作业实验
实验9 气动机械手搬运钢球设计实验
产品售价:
5800元/套;
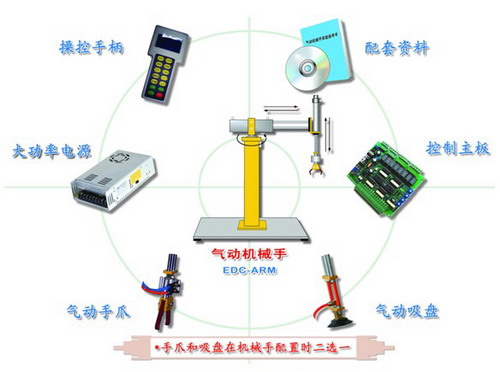
产品配置:
| 1 | 气动机械手本机(吸盘式或手爪式二选一) | 1 | 台 |
| 2 | 气动机械手控制器 | 1 | 块 |
| 3 | 气动机械手控制手柄 | 1 | 把 |
| 4 | 大功率电源 | 1 | 块 |
| 5 | 步进电机驱动器 | 1 | 套 |
| 6 | 《产品手册》《实验指导书》及光盘 | 1 | 套 |
| *7 | 小型气泵(选配) | 1 | 台 |
*备注:10—30套的气动机械手实验室,可以选配一台气泵;
欢迎和大专院校机电专业共建机械手实验室。

建筑大学以10台机械手构建的机械手、机器人实验室;应用于机电与自动化教学效果很好

学生在做计算机控制机械手的实验
资料下载:
实验指导书、产品手册、产品视频,请到网站“资料下载/气动机械手资料”区下载、查看:
| 地址:北京市顺义区临空经济核心区裕华路28号2号楼2层 客户服务电话:010-62669059 邮箱:fae@61mcu.com | |
| Copyright © 2004-2021 北京纳克斯机器人技术有限公司. All rights reserved. 京ICP备2021012102号 | |
| (浏览本网主页,建议将电脑显示屏的分辨率调为1024*768) | |
| ( 备用域名:www.nuxrobot.com,www.nuxrobot.cn,www.nuxtech.cn) | |
|
|
|